摘要:目前国际卫星导航领域技术和应用产业飞速发展,四大全球卫星导航系统GPS/GLONASS/GALILEO/COMPASS正处于系统建设和现代化进程之中,多模GNSS系统的服务性能提高以及兼容应用将成为未来主流发展趋势。本文详细阐述了目前国内外在兼容与互操作方面的研究情况,并对未来多模GNSS系统的发展趋势进行了展望。
关键词:全球卫星导航系统;兼容性;互操作性;ICG会议
1、引言
卫星导航系统在经济和安全领域中的重要作用,正在使其成为世界强国间新一轮竞争的焦点。为了摆脱对美俄导航定位系统的依赖,以免受制于人,世界各国、各地区和组织将纷纷建立自己的卫星导航定位系统。现有或在建的主要卫星导航系统(GPS,Galileo,GLONASS,Compass等)在应用服务、系统构成、定位原理、工作频率、信号调制方式以及星历数据结构等方面相同或类似。而卫星导航系统的频率资源、轨道资源是有限的。随着越来越多的卫星占用中高度轨道有限的轨位,越来越多的信号占用拥挤而宝贵的L波段卫星导航频带资源,同时随着卫星信号功率的增加,系统间干扰(即兼容性)和相互协作(即互操作)问题越来越引起人们的关注。
兼容性是指[1]两个或多个系统同时工作时,不会引起冲突,相对于单系统工作的情况不会产生显著的性能下降,即系统间干扰引起的性能降低应在一个可接受的范围内。互操作性是指在两个或多个系统同时工作时,通过联合利用不同星座的多颗卫星的信息(如伪距观测量、导航电文),来提高导航定位的可用性和精度的方法,实现互操作的系统服务性能显著超过其中任何一个系统单独工作的效果。兼容性与互操作性是互相交织、密不可分的。兼容性是必需的、基本的要求,是互操作的前提(不兼容的系统根本谈不上性能的互相增强),一般可以从用户设备层面来考察;互操作则是进一步的要求,需要从系统级来考察。互操作水平是优化处理的结果,是可以通过努力在用户层面上达到的。影响两个或多个系统之间的兼容性和互操作性的主要因素有四个:星座布局、空间信号、大地坐标参考框架、时间参考框架。
本文旨在给出多模GNSS兼容与互操作技术概况,分别阐述了现代化GPS的兼容性和互操作性设计现状、GLONASS的兼容性和互操作性设计现状、Galileo系统兼容与互操作设计现状、Compass系统兼容与互操作设计现状、兼容性与互操作性的分析方法、兼容性与互操作评估试验场,以及全球导航卫星国际委员会会议等方面。并且对未来多模导航系统的发展方向提出了一些自己的观点。
2、国内外研究现状分析
2.1 现代化GPS的兼容性和互操作性设计现状
在信号体制方面,GPS现代化升级计划充分考虑了与原有系统的前向兼容,采用了新一代的副载波调制信号,该类信号的主瓣偏离了载波频率,频偏距离由副载波的频率决定。目前GPS已经发射了其现代化卫星GPS IIR-M,播发了第二个民用信号L2C及现代化的军用信号M码[2]-[4]。第一颗GPS IIF卫星也于2010年5月发射[5],播发了第三个民用信号L5。到2014年还会发射下一代导航卫星GPS III,在该系列卫星上将播发第四个民用信号L1C。其中,M码旨在确保美国及其盟友的军事优势,其好处包括:提高安全性,与民用信号频谱分离以支持抗干扰的非干扰高功率模式,增强的跟踪和数据解调性能,稳健的捕获,与C/A码和P码的兼容。L1C采用与欧盟Galileo E1 OS兼容和互操作的MBOC(6,1,1/11)调制[6],其时域实现采用TMBOC(6,1,4/33)。在L5信号设计过程中,美国还专门研究了L5信号与测距仪(DME)、塔康系统(TACAN)、联合战术分发系统(JTIDS)、多功能战术分发系统(MIDS)和空管雷达(ATC)等多个使用1175.46MHz附近频率资源的系统的兼容性。最终,GPS占用了三个频段:L1、L2和L5,在这三个中心频率上发射了8种信号,见表1和图1。
表1GPS信号[7][8][9]
中心频率
(MHz) |
信号 |
调制方式 |
码型 |
码长 |
带宽(MHz) |
服务 |
| L1(1575.42) |
C/A码 |
BPSK-R(1) |
GOLD |
1023 |
2.046 |
OS |
| P(Y)码 |
BPSK-R(10) |
复合码 |
6187104000000 |
20.46 |
AS |
| L1C-I |
BOC(1,1) |
Weil |
10230 |
24.552 |
OS |
| L1C-Q |
TMBOC |
Weil |
1800×10230 |
| M码 |
BOC(10,5) |
未公开 |
未公开 |
30.69 |
AS |
| L2(1227.60) |
P(Y)码 |
BPSK-R(10) |
复合码 |
6187104000000 |
20.46 |
AS |
| M码 |
BOC(10,5) |
未公开 |
未公开 |
30.69 |
AS |
| L2C |
BPSK-R(1) |
截断m |
CM:10230
CL:767250 |
2.046 |
OS |
| L5(1176.45) |
L5 |
BPSK-R(10) |
复合码 |
10230 |
20.46 |
OS |
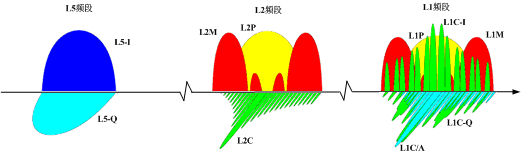
图1GPS信号分布
在坐标基准方面,GPS采用的WGS84坐标系,是一个协议地球参考系,它包括WGS84的参考椭球,WGS84的基本常数以及地球重力场模型和全球大地水准面。美国国家影像制图局(NIMA)在二十世纪九十年代中期又对WGS84进行了精化与增强,得到了WGS84 (730)和WGS84 (873)。经过1994年和1996的两次精化,WGS84的基本参数也发生了变化,其定义的新的四个基本参数为:
表2WGS84基本参数
| 长半轴 |
a=6378137.0 m |
| 地球引力常数(包含大气层) |
GM=3986004.418×108 m3sec-2 |
| 椭球扁率的倒数 |
1/f=298.257223563 |
| 地球自转角速度 |
ω=7292115.0×10-11 rad sec-1 |
在时间基准方面,GPS的时间系统称为GPS系统时,简写为GPST,其历元1980年1月6日零时与UTC保持一致,与国际原子时保持有19s的常数差,是一个连续的时间系统。GPS系统时是由所有工作的GPS卫星和地面控制区段的原子频标所共同维持的导航时标,它以UTC(USNO)为基准,但不进行跳秒调整。要求GPS控制区段调节GPS系统时使之与UTC(USNO)的偏差在1 μs以内(模1 s),然而典型的偏差是在50 ns以内(模1 s)。
2.2 GLONASS的兼容性和互操作性设计现状
在信号体制方面,基于GPS-GLONASS互操作性和兼容性工作组WG-1于2006年12月13-14的会议文件,双方均认识到在关于FDMA 和CDMA 的问题上使用共同的方式有益于两个系统的互操作,这也许会促成俄罗斯从FDMA信号转变为播发更具互操作性的CDMA信号。在GLONASS信号现代化计划中,除播发向下兼容的L1PT信号和L2PT信号外,还将播发与Galileo-E5b兼容的L3PT(FDMA体制)信号,而在未来系统中还将播发能够与GPS-L1/Galileo-E1完全兼容和互操作的L1CR信号,以及与GPS-L5/Galileo-E5a完全兼容与互操作的L5R信号,只是具体的实现方式还在进一步论证之中。具体的信号见表3与图2。
表3GLONASS信号
[10]
| 中心频率(MHz) |
信号 |
调制方式 |
带宽(MHz) |
服务 |
L1PT
(1598.0625-1605.3750) |
L1PT C/A |
BPSK-R(0.511) |
1.022 |
OS |
| L1PT P |
BPSK-R(5.11) |
10.22 |
AS |
L2PT
(1242.9375-1248.6250) |
L1PT C/A |
BPSK-R(0.511) |
1.022 |
OS |
| L1PT P |
BPSK-R(5.11) |
10.22 |
AS |
L3PT
(1201.7430-1209.7800) |
L3PT P |
BPSK-R(4) |
8 |
AS |

图2GLONASS信号分布
在坐标基准方面,GLONASS系统采用PZ-90坐标系。PZ-90亦属地心坐标系,其原点位于地球质心,Z轴指向与IERS协议地球极重合,X轴与地球赤道面和BIH零子午面的交线重合,Y轴完成右手坐标系,同WGS84一样,PZ-90定义了自己的重力场模型,采用的参考椭球参数和其它参数见表4。俄罗斯方面通过在俄罗斯西部进行的有限测量已初步测定了PZ-90和WGS-84之间的旋转矩阵,认为这个矩阵精确到5~10 m。
表4PZ-90采用的大地测量常数和椭球参数
| 地球自转速率 |
7.292115×10-5 rad/s |
| 地球引力常数 |
398600.44×109 m3/s2 |
| 地球大气引力常数 |
0.35×109 m3/s2 |
| 光速 |
299792458 m/s |
| 地球长半轴 |
6378136 m |
| 地球扁率 |
l/298.257839303 |
| 赤道上重力加速度 |
978032.8 mgal |
| 海平面上由大气引起的重力加速度改正 |
-0.9 mgal |
| 二阶带谐项系数 |
1082625.7×10-9 |
| 四阶带谐项系数 |
-2370.9×10-9 |
| 参考椭球面上的正常重力位 |
62636861.074 m2/s2 |
在时间基准方面,GLONASS同时提供GLONASS系统时(保存在莫斯科)和UTC(SU)(保存在莫斯科附近门德列夫的全联邦物理、技术和无线电技术测量研究所)。UTC(SU)与国际计量局和欧洲的协作得到进一步加强。在2007年全球卫星导航系统国际委员会(GNSS ICG)会议上俄国的报告显示GLONASS系统时与UTC(SU)的时间误差为6ns(最大为120ns)。
2.3 Galileo系统兼容与互操作设计现状
在信号体制方面,Galileo系统很好地与GPS系统实现了兼容性与互操作,双方在2004年6月26日于爱尔兰召开的EU-U.S.政府首脑会议上就Galileo和GPS的问题达成了一致意见,签署了《关于促进、提供和使用Galileo与GPS卫星导航系统及其相关应用的协议》和《GPS/Galileo兼容性分析参考假设》、《GPS/Galileo无线电频率兼容性分析》、《GPS/Galileo时间偏置初步接口定义》、《GPS与Galileo信号结构》等附件。在US/EU的协议中,已就两个系统的定时和测地标准达成一致,就Galileo开放式服务和公共特许服务信号结构也达成了一致。当前,Galileo E5a和E2-L1-E1信号分别具有与GPS L5及现代化的L1C信号(GPS III)相同的调制方式和载波频率,如如表5与图3所示。
表5Galileo信号
[11]
中心频率
(MHz) |
信号 |
调制方式 |
码型 |
码长 |
带宽(MHz) |
服务 |
| E1(1575.42) |
E1B |
CBOC(6,1,1/11) |
存储码 |
4092 |
24.552 |
OS/CS/SoL |
| E1C |
4092×25 |
| E1A |
BOCcos(15,2.5) |
未公开 |
未公开 |
35.805 |
PRS |
| E5(1191.795) |
E5 |
E5a-I |
AltBOC(15,10) |
Gold |
10230×20 |
51.15 |
OS/CS/SoL |
| E5a-Q |
10230×100 |
| E5b-I |
10230×4 |
| E5b-Q |
10230×100 |
| E6(1278.75) |
E6A |
BOCcos(10,5) |
未公开 |
未公开 |
40.92 |
PRS |
| E6B-I |
BPSK-R(5) |
存储码 |
4092 |
5.115 |
CS |
| E6B-Q |
4092×25 |
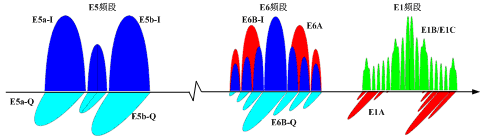
图3Galileo信号分布
在坐标基准方面,GALILEO系统所采用的坐标系统是基于GALILEO地球参考框架(GTRF) 的ITRF-96大地坐标系,其几何定义为:原点位于地球质心,Z轴指向IERS推荐的协议地球原点(CTP)方向,X轴指向地球赤道与BIH定义的零子午线交点,Y轴满足右手坐标系。WGS-84和GTRF的误差预计是在几厘米的量级。这就意味着WGS-84和GTRF在实现的精度范围内是一样的(即坐标参考基准是互相兼容的)。对于大多数用户的需求来说,这种精度就足够了。
在时间基准方面,Galileo系统时(GST)以1秒为模, GST建立在一种时间预报上,这一预报通过一个外部的Galileo时间服务供应商从许多UTC实验室获得。在任意一年的时间间隔内GST与TAI(国际原子时)的时间偏差规定为小于50ns(95%)。配备了Galileo授时接收机的用户在任意24小时的工作中都能够以30ns(95%)精度来预测UTC时间。
2.4 Compass系统兼容与互操作设计现状
已经建成的北斗卫星导航试验系统,采用双星定位方式,是一种区域性的RDSS系统。空间部分由2颗地球静止卫星和1颗备份卫星组成。工作于卫星无线电定位业务频段,上行为L频段(中心频率为1615.68MHz),下行为S频段(中心频率为2491.75MHz)。随后又进行了BD2的设计与实施,空间段采用5颗GEO卫星和30颗NGEO卫星组成,2008年Inside GNSS公布了Compass信号初步方案
[12],2009年7月,在ICG会议上中国卫星导航定位应用管理中心(CNAGA)公布了Compass信号最新方案
[13]。如表 6和图 4所示。
表 6 Compass信号
| 中心频率(MHz) |
信号 |
调制方式 |
码长* |
带宽(MHz) |
服务 |
| BD-2 |
B1
(1575.42) |
B1-CD |
MBOC |
4092 |
30.69 |
OS |
| B1-CP |
| B1-AD |
BOC(14,2) |
20460 |
32.736 |
AS |
| B1-AP |
B2
(1191.795) |
B2aD |
AltBOC(15,10) |
10230×20 |
51.15 |
OS |
| B2aP |
| B2bD |
| B2bP |
B3
(1268.52) |
B3 |
QPSK(10) |
10230 |
20.46 |
AS |
| B3-AD |
BOC(15,2.5) |
1023×25 |
40.92 |
AS |
| B3-AP |
*表示为假设值
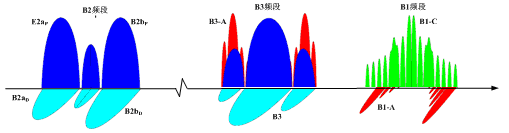
图 4 Compass信号分布
在坐标基准方面在,北斗卫星导航系统坐标系采用CGS2000,属于协议地球参考系。它的定义遵循IERS技术草稿21定义协议地球坐标系的法则。CGS2000参考椭球四个基本常数是:
表7PZ-90 CGS2000参考椭球四个基本常数
| 长半轴 |
a=6378137.0 m |
| 地球引力常数(包含大气层) |
GM=3986004.418×108 m3sec-2 |
| 椭球扁率的倒数 |
1/f=298.257222101 |
| 地球自转角速度 |
ω=7292115.0×10-11 rad sec-1 |
CGS2000坐标系还包括GRS80椭球基本常数导出的一些物理、几何常数,如二阶带谐项系数、椭球半短轴、第一偏心率、参考椭球的正常重力位、赤道上的正常重力等,CGS2000的椭球重力计算公式,CGS2000的地球引力位模型,CGS2000的大地水准面等。
在时间基准方面,COMPASS时间(BDT)起始点选为2006年1月1日UTC零点,秒长取为国际单位制SI秒,仍然是一个连续的时间系统;
在系统层面上,基于政治因素和国家安全方面的考虑,我国在Compass-1号(Compass第一代)卫星导航系统建设过程中仅仅研究了如何使Compass-1信号与其它导航系统和无线电系统实现谱分离,并没有考虑互操作性,因为当时也没有这种需求。
最近两年,我国的科研工作者为积极溶入国际GNSS大家庭做了许多工作,包括组织国际导航频率协调研讨会、参加全球卫星导航系统国际委员会(GNSS ICG)会议、在国家科技研究课题中体现多模GNSS兼容与互操作研究内容等等。这些都表明我国在Compass卫星导航系统设计过程中,正深入开展多卫星导航系统兼容和互操作性研究。相信未来几年会有大量研究成果出现。
2.5兼容性与互操作性的分析方法
从上世纪末本世纪初欧美就开始了卫星导航信号兼容与互操作评估方法方面的研究,发表了大量文献。
在兼容性分析评估方法方面:Godet J.首次分析了卫星导航系统间的频率兼容性
[14],得出在满足一定载噪比下降的条件下,Galileo信号与GPS信号同频段是可行的。在伽利略信号初步确定后
[15],又分析了Galileo与GPS间的信号兼容性
[16]。Owen R. 等人
[17]在分析GPS系统内干扰时提出了最大集总信号功率的概念。文献[18]提出理论分析的方法分析系统内与系统间干扰。经过多年的研究,欧美同意采用计算等效载噪比衰减值的方法来评估GPS与Galileo之间的兼容性,国际电信联盟也于2007年出台了“RNSS系统间干扰评估协调方法”(ITU-R M.1831)
[20],用于各卫星导航系统间的频率协调。此外,文献[21]首次指出在分析GNSS系统间干扰对接收机影响时应考虑采样与量化的影响,并提出了一种分析模型。Soualle F.
[22][23]提出了码跟踪谱敏感系数的概念,用于评估干扰对码跟踪过程的影响。文献[24]提出可以采用干扰误差包络(IEE)来评估干扰对不同GNSS信号的影响。Gisbert
[25]根据ITU-R M.1831文件中的方法,仿真分析了升级后的四大导航系统的干扰。兼容性直接与信号接收处理过程相关,主要包括捕获与跟踪过程,国外在信号接收处理模型上也进行了深入的研究。文献[26]推导了单或双驻留时间下平均捕获时间表达式,文献[27]针对室内应用信号的捕获算法进行了理论分析与比较,文献[28]从捕获角度评估了扩频码兼容性。美国Betz教授等人奠定了卫星导航信号码跟踪理论,在2000年撰写了两篇影响深远的文章,可参见文献[29]和文献[30]。在此基础上,Betz教授还分析了窄带干扰
[32]、非白色高斯干扰
[33]对码跟踪精度的影响,并且在文献[34]中对GPS军用信号进行了比较分析。Soellner等人
[35]分析了由于信号传输链路的线性或非线性效应对码跟踪的影响。
在互操作评估方法方面:从目前的国际形势来看还处于概念与评估方法研究的初期阶段,还没有形成一套成系统的互操作评估方法,只是在各关键技术中有所突破。例如,Maxwell S B Starr等人
[36]研究了GPS和GLONASS系统广播轨道和时间模型的准确性问题,Clifford W. Kelley等人
[37]研究了GPS/GLONASS/GALILEO星座的协同工作问题,H. Krag等人
[38]研究了GPS和GALILEO星座升交点赤经(Right Ascension of Ascending Node,RAAN)的漂移问题,德国航空宇航中心的Alexandre Moudrak等人
[39]研究了GPS/GALILEO时间漂移问题。J. Hahn
[40]和A. Moudrak
[41]研究了GPS/GALILEO时间互操作问题。Ganguly
[42][43]从接收机角度研究了GPS/GALILEO信号间的互操作性。Joseph
[44]分析了未来GNSS的互操作性。GALILEO集团的Dellago
[45]研究了GALILEO系统和GPS系统间的互操作性。Seynat
[46]等人对未来GNSS性能进行了分析。Todd Richert和d Dr. Naser El-Sheimy
[47]分析了未来GNSS在精密载波相位定位时抗相位模糊的性能。
国内关于卫星导航信号兼容性与互操作评估技术的研究还相对薄弱,在基础理论方面,唐祖平博士在码跟踪理论中进行了探索性研究
[48][49],文献[50]从精度、抗干扰、抗多径、兼容性四个方面初步给出了北斗导航信号性能评估结果,文献[51]提出了一种可用于非白干扰环境下码跟踪精度分析方法,文献[52]给出了BOC、BCS和MBOC的性能分析结果。文献[53]分析了星上高功率放大器对导航信号伪码跟踪精度的影响,得出非线性失真对跟踪性能的影响可以忽略不计。朱祥维等人
[54]定量研究了各阶群时延对伪距测量的影响。在评估方法方面,近几年也有研究人员开展了研究工作,主要集中于总装研发中心、总参定位总站、北京航空航天大学、中国电科五十四所导航中心、华中科技大学和上海交通大学等几家科研院所,也有一些文献发表
[55]-[62]。
2.6 全球导航卫星国际委员会会议
全球导航卫星系统国际委员会(ICG)从成立之日起就是为了促进国际GNSS的合作,所以ICG的所有会议和活动可以说都与GNSS兼容性密切相关。
2005年12月,联合国外层空间事务处在维也纳召开ICG成立国际会议。
2006年11月,ICG在维也纳召开第一次会议。会议促进了GNSS的使用,以支持可持续发展,尤其是发展中国家,同时也促进了GNSS的兼容。
2007年9月5日至7日,ICG第二次会议在印度班加罗尔举行。此次会议的一个重要进展是成立了供应商论坛,旨在推动GNSS当前和未来供应商之间更大的兼容性。会议还专门举办了以GNSS兼容性为主题的研讨会,制定了GNSS兼容性工作计划,主要包括:1)组织一次(或多次)研讨会,讨论成为成员、准成员和观察员所需条件,旨在增进全球或区域导航天基导航系统的兼容性,以及增进地基差分全球导航卫星系统的兼容性而正在采取的措施。2)制定ICG支持下的电磁干扰发现和减弱机制,同时考虑到现有的规范机制。
2008年12月8日至12日,ICG第三次会议在美国加州帕萨迪纳召开。此次会议各方都提出了对兼容性的理解,但各方观点存在较大分歧,欧盟和美国希望将兼容性应包含系统授权信号与其他系统信号的频谱分离,俄罗斯则主张弱化兼容与频谱分离关系,日本表示支持美国的观点。最终,初步完成了对兼容性原则与定义的修改。
2009年9月14日至18日,ICG第四次会议在圣彼得堡召开。各方又就兼容性问题进行了讨论,提出“工作组将特别审议现有的与消除有害干扰有关的ITU规则与建议书,寻求在确定所有GNSS系统兼容的合适方法上达成共识;在必要时,通过合适的机制提出新的方案以供ITU考虑,进一步保护影响所有GNSS噪声背景环境以及确定GNSS供应商用来确保兼容的方法”。
2010年10月18日至22日,ICG第五次会议在意大利都灵召开,会议由欧盟与意大利联合主办,工作组A会议继续围绕着兼容与互操作、开放服务与信息分发等方面进行讨论。其中,卢鋆博士作了题为“北斗对多边兼容讨论的观点”,通过算例分析阐明了北斗的观点与立场,并提出了后续讨论建议。
3、未来发展趋势与建议
3.1 未来多模信号形成国际标准
从全球卫星导航系统的发展趋势来看,民用L频段信号间的干扰已不可避免,而且随导航系统数量和服务类型的增加,系统间和系统内干扰还会进一步加剧。发达国家已就导航信号的兼容和互操作性问题展开多轮谈判,并签署了若干协议。为了最大可能减少系统间干扰,在民用信号领域,类似的协议还将出现,多模导航信号很有可能形成国际标准。例如:GPS和Galileo系统都将在L1频段播发MBOC信号,采用几乎相同的信号体制,并将其作为未来民用主流信号。GPS的L5信号与Galileo的E5a信号是兼容且互操作的。而GLONASS也在未来的现代化计划中考虑了L1CR信号和L5R信号,分别与L1(1575.42MHz)和L5(1176.45MHz)信号实现兼容与互操作。显然,L1(1575.42MHz)和L5(1176.45MHz)两个频段处的信号体制很有可能形成国际标准。
3.2 多模兼容和互操作基础上提高导航信号的性能
在兼容和互操作前提下,如何设计信号才能使导航系统具有更高的精度、更好的抗多径和抗干扰能力是导航信号设计追求的目标。通过采用新的调制方式实现信号功率谱谱峰远离中心频率,一方面可以最大程度减少与原有信号的干扰,另一方面通过改变Gabor带宽减小了接收机码跟踪误差。在多模兼容基础上提高导航信号的性能是导航系统发展的趋势。
3.3 多模终端是未来应用的主流设备
显而易见,GNSS的互操作能够带来导航、定位和授时性能的显著提高。宽带天线技术、高性能射频前端技术和微电子技术的发展以及高速多核并行处理器的出现使多模GNSS信号接收机的小型化和广泛使用成为可能。未来几年内,在民用领域,多模GNSS接收机将逐步取代单模、单码接收机,成为导航接收终端设备的主流。
参考文献
[1] Dellago R.,Detoma E.,Luongo F..Galileo-GPS Interoperability And Compatibility: A Synergetic Viewpoint. Portland, ION GPS/GNSS 2003:542-548
[2] 李跃, 邱致和. 导航与定位-信息化战争的北斗星[M]. 第二版. 北京: 国防工业出版社, 2008: 112-147, 327-383页
[3] 陈向东, 许来玲. GPS卫星导航信号体制的发展和设计比较研究[J]. 全球定位系统, 2006, 4:18-20,25页
[4] 马芮, 孔星炜. GNSS系统的现状与发展[J]. 现代防御技术, 2008, 36(2):73-77页
[5] Bolt T. The nest generation GPS IIF-1 Satellite sends 1st signals from space [EB/OL].http://www.armybase.us/2010/05/the-next-generation-global-positioning-system-gps-iif-1-satellite-sends-1st-signals-from-space, 2010-05-28
[6] Hein G. W., Rodriguez J.A.A.,Wallner S.,ect..MBOC: The New Optimized Spreading Modulation Recommended for Galileo L1 OS and GPS L1C. www.insidegnss.com may/june2006
[7] GPS Joint Program Office. GPS Interference Specification. IS-GPS-200[S]. Revision D, IRN-200D-001. EI Segundo: CES, 2006
[8] GPS Joint Program Office. GPS Interference Specification. IS-GPS-705[S]. EI Segundo: CES, 2003
[9] GPS Joint Program Office. GPS Interference Specification. IS-GPS-800[S]. EI Segundo: CES, 2007
[10] Coordination Scientific Information Center. GLONASS Interface Control Document[S]. Moscow, 1998
[11] ESA. Galileo OS SIS ICD[S]. Draft 1, Galileo Joint Undertaking, 2008
[12] Inside gnss. China Adds Details to Compass(Beidou II) Signal Plans[EB/OL]. http://www.insidegnss.com/node/803, 2008
[13] CNAGA. COMPASS View on Compatibility and Interoperability[EB/OL]. http://www.unoosa.org/pdf/icg/2009/workgroupinterop/04.pdf, 2009
[14] Godet J. GPS/Galileo Radio Frequency Compatibility Analysis. ION GPS 2000. Alexandria, VA: ION, 2000:1782-1790P
[15] Hein G.W., Godet J., Issler J.L., et al. Status of Galileo Frequency and Signal Design. ION GPS 2002, Alexandria, VA: ION, 2002:266-277P
[16] Godet J., De Mateo J.C., Erhard P., et al. Assessing the Radio Frequency Compatibility between GPS and Galileo. ION GPS 2002, Alexandria, VA: ION, 2002:1260-1269P
[17] Owen R., Goldstein D.B., Hegarty C. Modeling Maximum Aggregate GPS Signal Power Levels for GPS Self-Interference Analyses. ION NTM 2002, Alexandria, VA: ION, 2002:939-947P
[18] Van Dierendonck A.J., Hegarty C. Methodologies for Assessing Intrasystem and Intersystem Interference to Satellite Navigation Systems. ION GPS 2002, Alexandria, VA: ION, 2002:1241-1250P
[19] Van Dierendonck A.J., Hegarty C., Pullen S. A More Complete and Updated Methodology for Assessing Intrasystem and Intersystem Interference for GPS and Galileo. ION GPS 2003, Alexandria, VA: ION, 2003:1484-1493P
[20] ITU. A Coordination Methodology for RNSS Inter-system Interference Estimation.http://webs.uvigo.es/servicios/biblioteca/uit/rec/M/R-REC-M.1831-0-200710-I!!PDF-E.pdf , 2007
[21] Betz J.W., Shnidman N.R. Receiver Processing Losses with Bandlimiting and One-Bit Sampling. ION GNSS 2007. Alexandria, VA: ION, 2007:1244-1256P
[22] Soualle F. Introduction an Additional Radio Frequency Compatibility Criterion for Code Tracking Performance. 2nd Workshop on GNSS Signals and Signal Processing, 2007
[23] Soualle F. Radio Frequency Compatibility Criterion for Code Tracking Performance. ION GNSS 2007, Alexandria, VA: ION, 2007: 1201-1210P
[24] Motella B., Savasta S., Margaria D., et al. An Interference Impact Assessment Model for GNSS Signals. ION ITM 2008, Alexandria, VA: ION, 2008: 900-908P
[25] Gisbert J.V.P. Interference Assessment using up to Data Public Information of Operating and Under Development RNSS Systems. Oberpfaffenhofen, DLR, 2009
[26] Holmes J.K. 梁振兴, 蔡开基(译). 相干扩展频谱系统. 北京: 国防工业出版社, 1991: 468-549页
[27] Avila-Rodriguez J.A., Heiries V., Pany T. et al. Theory on Acquisition Algorithms for Indoor Positioning. Saint Petersburg International Conference on Integrated Navigation System, Saint Peterburg, 2005: 1-10P
[28] Soualle F., Wendel J. Proposition for a Simple and Representative Radio Frequency Compatibility Criterion for Spreading Code Acquisition. Oberpfaffenhofen, DLR, 2009
[29] Betz J.W., Kolodziejski K.R. Generalized Theory of Code Tracking with an Early-late Discriminator, Part1: Lower Bound and Coherent Processing. IEEE Transactions on Aerospace Electronics and Systems, 2009, 45(4): 1538-1550P
[30] Betz J.W., Kolodziejski K.R. Generalized Theory of Code Tracking with an Early-late Discriminator, Part2: Noncoherent Processing and Numerical Results. IEEE Transactions on Aerospace Electronics and Systems, 2009, 45(4): 1557-1564P
[31] Betz J.W., Kolodziejski K.R. Extended Theory of Early-Late Code Tracking for a Bandlimited GPS Receiver. Navigation, 2000, 47(3): 211-226P
[32] Betz J.W. Effect of Narrowband Interference on GPS Code Tracking Accuracy[A]. ION NTM 2000. Alexandria, VA: ION, 2000:16-27P
[33] Betz J.W. Kolodziejski K R. Effect of Non-White Gaussian Interference on GPS Code Tracking Accuracy. The MITRE Corporation Technical Report MTR99B21R1, 1999
[34] Betz J.W. Design and Performance of Code Tracking for the GPS M Code Signal. ION GPS 2000. Alexandria, VA: ION, 2000:2140-2150P
[35] Soellner M. Kohl R. Luetke W., et al. The Impact of Linear and Non-linear Signal Distortions on Galileo Code Tracking Accuracy. ION GPS 2002. Alexandria, VA: ION, 2002:1270-1280P
[36] A Long-Term Statistical Analysis of the Accuracy of GPS and GLONASS Broadcast Orbit and Clock Models, Maxwell S B Starr, Matthew D Powe, John I R Owen, ION GNSS 17th International Technical Meeting of the Satellite Division, 21-24 Sept. 2004, Long Beach, CA
[37] GNSS - Coordinating the GPS-Galileo-GLONASS Constellations, Clifford W. Kelley ,Kenneth F. Davis ,Daniel M. Nguyen, ION GNSS 17th International Technical Meeting of the Satellite Division, 21-24 Sept. 2004, Long Beach, CA
[38] H. Krag, A. Leonard, P. Ranaudo, E. Blomenhofer. Global Implications of GPS and Galileo RAAN Drifts on GNSS Performance. ION GPS/GNSS 2003, 9-12 September 2003, Portland, OR
[39] Alexandre Moudrak. GPS Galileo Time Offset: How It Affects Positioning Accuracy and How to Cope with It. ION GNSS 17th International Technical Meeting of the Satellite Division, 21-24 Sept. 2004, Long Beach, CA
[40] J. Hahn and E. Powers, GPS and Galileo Timing Interoperability, Proceedings of GNSS 2004 (CDROM),2004
[41] A. Moudrak et al., Determination of GPS/Galileo Time Offset to Support System Interoperability,Proceedings of GNSS 2004 (CD-ROM), 2004
[42] Suman Ganguly,Aleksandar Jovancevic, Joseph Noronha, Interoperability Between GPS and Galileo,ION GNSS 17th International Technical Meeting of the Satellite Division, 21-24 Sept. 2004, Long Beach, CA
[43] Suman Ganguly, Aleksandar Jovancevic, Interoperability Study Between GPS and Galileo Signals, ION GPS/GNSS 2003, 9-12 September 2003, Portland, OR
[44] Mr. Joseph P. Lortie, Jr., Future GNSS Architecture:Interoperability or Compatibilityb Between Systems What is the Prudent Course to Pursue, ION GPS 2000, 19-22 September 2000, Salt Lake City, UT
[45] R. Dellago, E. Detoma, F. Luongo , Galileo-GPS Interoperability And Compatibility: A Synergetic Viewpoint, ION GPS/GNSS 2003, 9-12 September 2003, Portland, OR
[46] C.Seynat, A. Kealy, K. Zhang,A Performance Analysis of Future Global Navigation Satellite Systems, The 2004 International Symposium on GNSS/GPS Sydney, Australia 6-8 December 2004
[47] Todd Richert and Dr. Naser El-Sheimy .The Impact of Future Global Navigation Satellite Systems on Precise Carrier Phase Positioning. ION GNSS 17th International Technical Meeting of the Satellite Division, 21-24 Sept. 2004, Long Beach, CA
[48] 唐祖平. GNSS信号设计与评估若干理论研究[D].武汉: 华中科技大学,2009
[49] 唐祖平,胡修林,黄旭方. 卫星导航信号设计中的抗多径性能分析[J]. 华中科技大学学业报, 2009, 37(5):1-4页
[50] 唐祖平, 周鸿伟, 胡修林等. Compass导航信号性能评估研究[J]. 中国科学, 2010, 40(5):592-602页
[51] 唐祖平, 胡修林, 黄旭方. 现代化的GPS新民用信号L1C码跟踪性能分析[J]. 电讯技术, 2009,(1): 1-7页
[52] 黄旭方, 胡修林, 陈晓翔. BOC、MBOC和CBCS三种子载波调制方式的性能分析[J].电讯技术, 2008, 48(10):63-68页
[53] 黄旭方, 胡修林, 唐祖平. 星上高功率放大器对导航信号功率谱和伪码跟踪精度的影响[J]. 电子学报, 2009, 37(3):640-645页
[54] 朱祥维, 孙广富, 雍少为等. 相位非线性畸变对GPS伪距测量的影响[J]. 国防科技大学学报, 2008, 30(6):101-106页
[55] 李建文, 李作虎, 郝金明, 等. GNSS 的兼容与互操作初步研究[J]. 测绘科学技术学报, 2009. 26(3): 178-180页
[56] 庄新彦,赵晓东,谭述森,等. Compass系统与GPS系统L1频段信号干扰仿真分析[J]. 测绘科学技术学报,2009, 26(3): 216-219页
[57] 庄新彦, 郭莉莉. Compass B2a 与GPS L5信号间干扰仿真分析[J]. 全球定位系统, 2009, 17-20页
[58] 黄旭方. GNSS无线频率兼容及高功放非线性效应影响的研究[D]. 华中科技大学, 2009
[59] 黄旭方. GPS L1频段上的系统内干扰的研究[J]. 宇航学报, 2010, 31(10):2402-2406页
[60] 黄旭方, 胡修林, 唐祖平等. 导航系统中短码受到系统内干扰的分析方法[J]. 华中科技大学学报, 2009,37(3):46-49页
[61] 冉一航, 胡修林, 刘禹圻等. Compass系统导航信号的兼容性研究[J]. 中国科学: 物理学 力学 天文学, 2010, 40(5):676-684页
[62] 庄新彦, 赵晓东, 郭莉莉. Compass、GPS和Galileo系统集总增益系数仿真分析[J]. 电子技术应用, 2009,(9):95-97页










